
Farmatic
Farmatic was the biggest project that Team Kirchenfeldrobotics had ever undertaken. Jakob and Valéry took part in the World Robot Olympiad in the Future Innovators category, coached by Julian Levkov. This is the most open category, in which participants must invent something that does not yet exist in order to solve a problem, while also being innovative and aligned with the United Nations’ Sustainable Development Goals. Every year, new tasks are set for the robots. This year, the tasks were:
- Robots organize the cities of the future.
- Robots support life in space.
- AI enables robots to improve lives.
Generally, you choose one of the tasks or combine them. After hours of brainstorming and research, we decided to build a vertical farm, because we wanted a modular solution that could also be brought into space. But it can also be used in cities, since vertical farming is far more space-efficient than traditional farming. This can improve quality of life in urban areas and help ensure sufficient food production.
We also saw the opportunity to take a deeper dive into AI, which would provide feedback about the state of the plants.
Begining
We didn’t have much experience yet, so we simply started. Our tech stack wasn’t clearly defined. We only knew what we wanted to achieve, but not exactly how to build it. We began by splitting into hardware and software: Jakob worked on the hardware, and Valéry worked on the software. Of course, we constantly had to exchange ideas and help each other whenever something wasn’t working quite as expected.
Hardware
3d Print
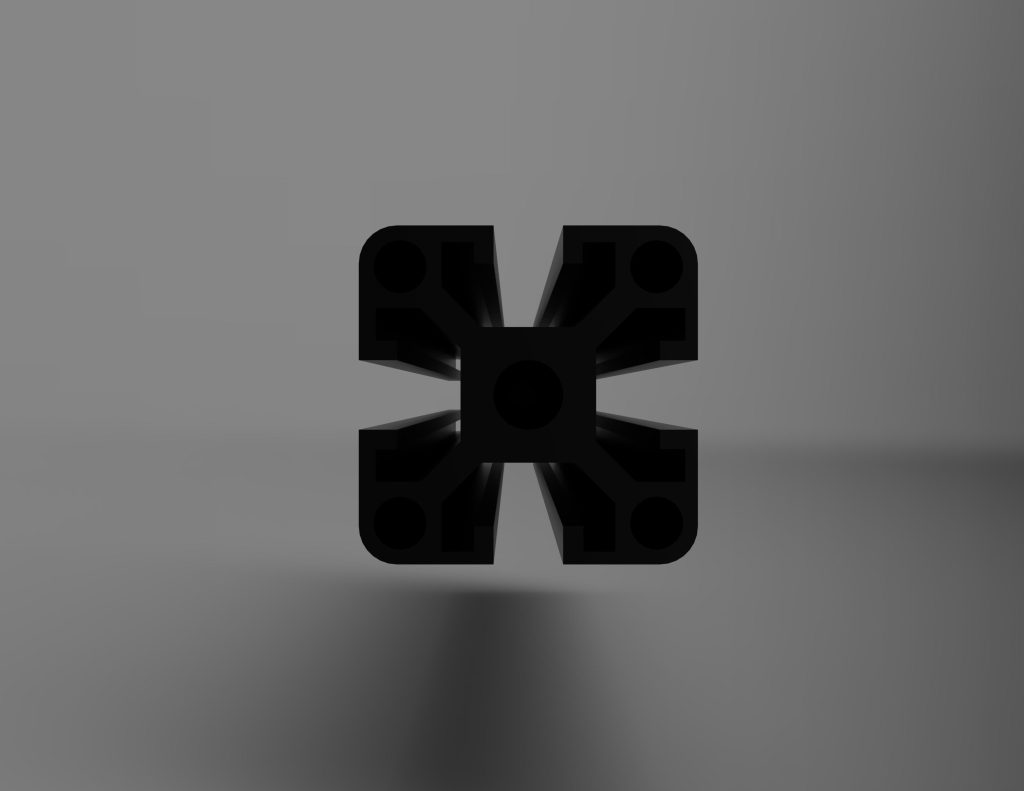
akob designed a fully modular, assemblable vertical farm in Fusion 360. After more than 200 prototypes and over 1500 hours of 3D printing, the frame of the farm was finally built. One of the most difficult parts was optimizing the profile of the bars. The goal was to use as little filament as possible for cost efficiency while still achieving maximum stability. To find the ideal balance, Jakob created many prototypes and ran Fusion 360 simulations to determine the optimal profile for the bars.
After that, we developed a shuttle equipped with a mechanism that brings the trays and boxes containing the seeds and growing plants into the lift. This allowed the tray to be moved downward for watering and also enabled an AI scan using a camera.
Printed Curcuit Board
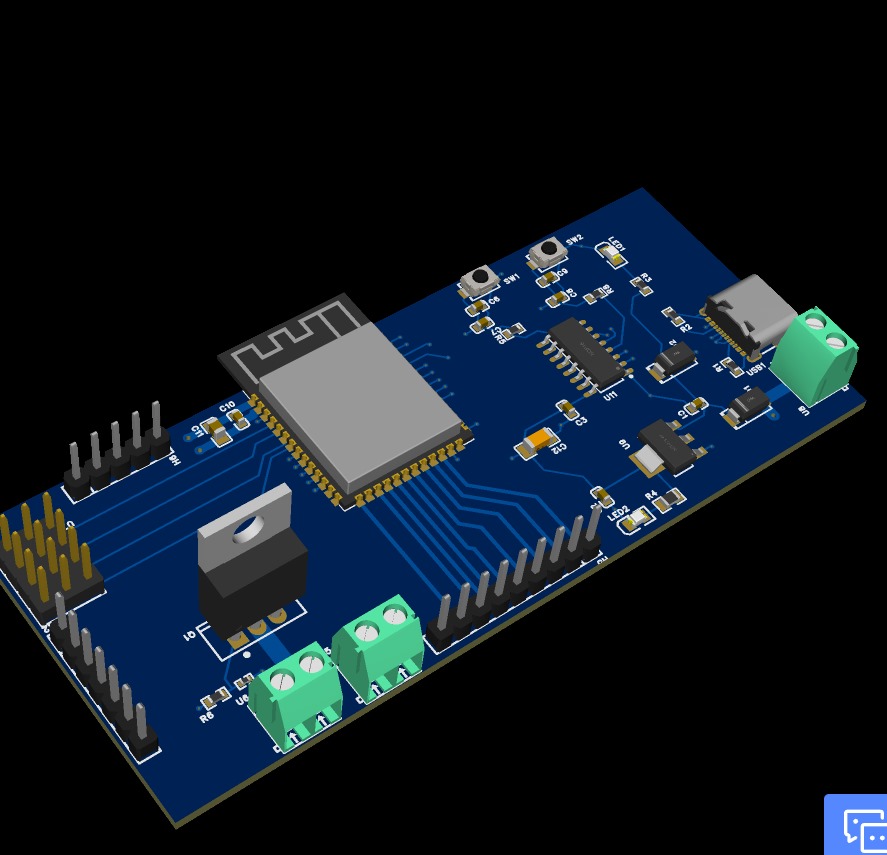
Jakob also designed a custom ESP-32 PCB completely from scratch. The first iteration didn’t work, but the second one was perfect. The advantages of using a PCB are that you can position the pins exactly as needed and also supply more than 3.3 volts, which a servo usually requires. Since this was a large project, we used more than 30 meters of cable for the entire farm.
Designing the PCB required a deep understanding of electrical engineering. Jakob read extensively, calculated everything carefully, and ran simulations to ensure that the board wouldn’t overheat and that no magnetic issues would occur.
Software
Mobile App
We didn’t know much about how to build an app. One of the most important requirements for us was that it should run natively on both Android and iOS while only needing to be programmed once. So Valéry searched for the best cross-platform framework. In his opinion, the best-supported solution — and one that also runs natively on Windows, Linux, and macOS — is the open-source Flutter SDK, a UI development kit by Google that uses the programming language Dart. The mobile app is used to control the entire farm.
ESP-32
The ESP-32 is programmed in C++. We set it up so that the ESP-32 creates its own WiFi network, which the mobile phone can connect to. Once connected, the app communicates with the ESP-32 via WiFi and executes the commands given from the phone.
The ESP-32 is connected to the stepper motors, which control the lift. It is also connected to the servo that moves the trays in and out of the lift mechanism. In addition, we built a watering system with two pumps, which were also controlled by the ESP-32.
PlantCV
We used a model called PlantCV, which is trained on dozens of plant datasets and is very accurate. We ran this OpenCV-based PlantCV model on the Raspberry Pi 5. This means that once the farm is fully developed, it would be able to operate completely automatically.
We didn’t actually finish this part, because the project is huge and we started with almost no prior experience. Over time, we gained a lot of knowledge and skills, which also meant that some of the early foundations we built were not as solid as they would be if we built them now. For the farm to work fully automatically and reliably, we would need to revisit and improve the base systems we created in the beginning.
Modular vertical Farm key features
- Moudularity
Our farm is fully modular. This means we can assemble and disassemble everything within 30 minutes. If you wanted to build such a farm in space, you could easily pack it into a rocket and assemble it on the Moon or on another planet. This is one of our most innovative features, because nothing like this existed before. - Vertical
Our farm is vertical. This means the trays (boxes where the plants grow) are stacked on top of each other. This is very space-efficient and doesn’t require many resources. It is the most sustainable solution. - Industrial Standart
For our project, we used industrial standards wherever possible. For example, our bars use a standard EU profile. We also designed our own custom PCB, which follows industrial standards. Our software is a cross-platform solution.
Organsation and Well-being
As it was our first big project, we didn’t really expect or think about how important it is to organize and plan everything properly. We only set our goals for the features and then worked hard to achieve them. We split into software and hardware, one person for each part. After the spring break, we suddenly had a lot to do for the project, so we invested a huge amount of time.
Jakob finished the documentation on the last night and slept for about one hour. Then, on the car ride to the Yverdon Regional Competition, we corrected the documentation. At the national competition, we had problems with our PlantCV model. Valéry and Jakob tried to fix it on the last night until 4:30 a.m., and then slept for about 1.5 hours before driving to the competition.
So yes: we worked a lot. But next time, we will organize ourselves better so that we can sleep more and stay healthier. Still, this whole process gave us a very valuable experience: it showed us that if you really want to achieve something and you are motivated, it is possible.
International Competition


The category is also about selling ideas and demonstrating their usefulness and potential impact. We learned a lot from this. Especially how to improve our presentation skills and how to explain technical projects to people with little or no technical background. For Jakob and Valéry, Ljubljana was their first international experience, and it marked a significant milestone for Kirchenfeldrobotics. We also won 3rd place and received the Special Team Award for Best Teamwork.
You can read more about our experience on our blog post about our international experience here.
Learings
Jakob and Valéry learned a lot of new things. We also realized that such a project goes far beyond the technical and software parts. It is also about writing good documentation, learning to work efficiently, and handling pressure — for example, there was a whole week where we slept less than three hours on average. For us, the experience was worth it for the learning alone.
We now have a completely new understanding of how to plan, structure, and organize a project. This is something we want to share with other robotics-interested people by creating a space to collaborate and connect with others in the tech field.